Uživatelské nástroje
Obsah
Obrazová data, jejich pořizování a možná poškození
Obrazová data
Obrazová data získáváme snímaním reálneho světa (fotografia, video). Takto získaná data jsou spojitá, avšak pro lepší reprezentaci v počítači se převádějí na diskrétní (rastrové) hodnoty získané vzorkovaním (je třeba dodržet vzorkovací teorém). Výsledkem je tedy reprezentace obrazu maticí diskrétních bodův, kde každý bod obsahuje informace o barvě (typicky barevné spektrum, úroveň jasu atd.). Tato reprezentace má ale svoje omezení:
- Barevné informace je třeba také vzorkovat, typickým modelem je RGB, který používá 3 zložky s 8-bit rozsahem na pixel (0–255)
- Velikost obrazu také nemůže být neomezená, proto sa zavádí pojem rozlišení obrazu v pixelech (např. 1024×768)
Reprezentace barev
- Diskrétní rastr barev – barva je směsí záření o různých vlnových délkách
- Barevná hloubka – počet bitů na jeden obrazový bod
- Paleta barev, true color, gray scale
Reprezentace obrazu
Spojitá funkce 2 proměnných: I(x, y): ⟨0, X) × ⟨0, Y) → ℝ, kde definiční obor D(f) je tvořen kartézským součinem dvou intervalů (obvykle od nuly do velikosti rozměru obrazu) a obor funkčních hodnot H(f) je množina reálných čísel.
Získavání obrazových dat
Optické systémy
- 1-čipové monochromatické
- 1-čipové barevné
- 3-čipové barevné
Obrazové senzory
CCD
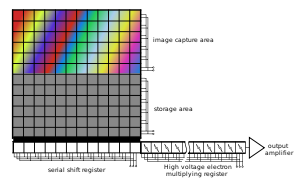
Matice světlocitlivých buněk. Každá buňka obsahuje čip a kondenzátor, který sa před expozicí nabije. Během expozice nastává úbytek náboje v kondenzátoru v důsledku dopadajícího světla (čím víc světla, tím víc úbytku). Po expozici se zbylý náboj pomocí posuvných registrů transportuje na okraj čipu a mění se na napěťový signál, který putuje do A/D převodníků.
- Výhody:
- Snímá celý obraz naráz, čili vhodné i pro rychle se pohybující objekty
- Robustnost vůči šumu (vyskytuje se jen transportní šum při posouvání náboje)
- Nevýhody:
- Potřeba více čipů na zpracováníe signálu
- Dražší, náročné na výrobu
- Vysoká spotřeba
{kind=link}
CMOS
Používá podobné buňky jako CCD, avšak zbytkový náboj sa přímo mění na napěťový signál (žádné posuvné registry, přímý A/D převod na jednom čipu).
- Výhody:
- Levnější výroba
- Vše sa dá realizovat na jednom čipu
- Nízka spotřeba
- Nevýhody:
- Protože se obraz neexponuje naráz, nevhodné pro rychle sa pohybujíce objekty
- Vzniká strukturální šum při převodu z náboje
Data získané z „neviditelného spektra“
- Rentgenové snímky
- Infračervené, ultrafialové snímky
Vypočtená data
Chyby v obraze
- Zkreslení – např. geometrické zkreslení družicového snímku vlivem zakřivení země.
- Šum – nežádoucí porucha obrazu
- Neostrost
Degradace obrazu
Vznikají při snímání (nedokonalost snímačů, chyby), přenosu dat obrazu přenosovou soustavou, zpracování
- Tepelný šum, Kvantizační šum, Defekty optických soustav (čoček),
- Nelinearita el. optických senzorů, Granularita filmového materiálu,
- Relativní pohyb mezi objektem a kamerou, Špatné zaostření, Zaokrouhlování při zpracování
Typy šumu
- Nezávislý šum – velikost šumu nezávisí na velikosti obrazového signálu. Vzniká např. při přenosu obrazu
- Závislý šum – závisí na velikosti obrazového signálu
- Aditivní šum – je nezávislý na obraze g(x, y) = f(x, y) + v(x, y)
- Multiplikativní šum – je závislý na velikosti obrazového signálu g = f + vf = f(1 + v) ≈ fv
-
- Bílý šum – Šum je nekorelovaný (náhodný), intenzita neklesá s rostoucí frekvencí (pro všechny frekvence stejně).
- Šedý šum – údolí, nízké hodnoty ve středu spektra
- Růžový šum – intenzita šumu klesá logaritmicky s rostoucí frekvencí
- Gaussův šum – Amplituda šumu má normální (Gaussovo) rozdělení pravděpodobnosti. Bílý Gaussův šum v mnoha situacích velmi dobře aproximuje reálný šum. Postihuje celý obraz.
- Šum typu „Pepř a sůl“ – Často nazýván impulsní (nebo výstřelový) šum. Postiženy jsou pouze ojedinělé body obrazu – extrémní hodnoty. Řešením je interpolace z okolních bodů – např. mediánový filtr.
- Úzkopásmový šum – Šumem jsou postiženy jen některé frekvence obrazu. Řešením je filtrace ve frekvenční oblasti (FFT → oříznutí → IFFT).
Postupy odstranění šumu
Reálně se šum nikdy nedá odstranit, ale existuje více metod na jeho potlačení.
Statistický přístup k filtraci šumu
- Průměrování z více snímků (např. z videa, kde se scéna nemění), průměrování bez rozmazání
- Průměrování z jednoho snímku – dochází k rozmazávání
- Průměr opakujících se oblastí – v podstatě nekolik realizací v jednom obraze
- Průměrování uvnitř snímku – reprezentant okolí pixelu nebo průměr z okolí → rozmazání hran
Lokální předzpracování obrazu
- Lineární filtrace
- Obyčejné průměrování (vyhlazovaní, např. gaussiánem – nevýhodou je rozmazanie hrán)
- Gausián – generování masky na základě gaussova rozložení
- Nelineární filtrace (vyhlazování) – při vyhlazování dochází k rozmázání hran – detekce okolí, kde se jas nemění → rotující maska
- Rotační masky – polohování masky kolem zvoleného bodu tak, aby se našla oblast s nejmenším rozptylem, pro masku 3 × 3 – 9 poloh, výhodné je okolí o lichém rozměru – bere se z něj medián, nikoliv průměr
- Narůstání okolí
- Medián – seřadí pixely z okolí a vybere medián, výborný na výstřelový šum
Dobré filtry na odstranění šumu se dají navrhnout ve frekvenční oblasti pomocí FFT. V ní potom snáze vidíme šum (projevuje se vyššími frekvencemi v obraze) a na základě toho navrhnout filtr na jeho odstranění.
Optimální filtrace obrazu
Pokud:
- Máme zkreslený obraz
- Hledáme odhad tak, aby vyhověl kritériu
- Známe různé vlastnosti šumu a zkreslení systému
Metody se liší tím, jaké vlastnosti známe:
- Slepá dekonvoluce – neznáme nic
- Vázaná dekonvoluce – známe celkovou energii šumu
-
- Pro nezanedbatelný šum nezávislý na signálu, který má odhadnutelné statistické vlastnosti
- Kritérium je minimum střední kvadratické chyby mezi odhadem a skutečností E{[f(i, j) − f′(i, j)]²} → Min
- Řešením je vzah: prostý inverzní filtr × wienerův korelační faktor
- Použitelné pro korekci rozmazání pohybem s šumem
Nástroje pro stránku
