Obsah
Transformace, reprezentace a zobrazení 3D objektů
Geometrické transformace jsou jedny z nejčetnějších operací v současné počítačové grafice. Můžeme je chápat jako změnu pozice vrcholů v aktuálním souřadnicovém systému nebo jako změnu souřadnicového systému.
Homogenní souřadnice
Jsou zavedeny kvůli jednotné manipulaci se všemi transformačními maticemi, protože v případě karteziánských souřadnic by jsme u posunutí použili sčítání a u ostatních operací zas násobení. Takhle všude použijeme násobení matic, tj. jednotný způsob (ulehčí implementaci).
Definice: Homogenní souřadnice bodu v 3D s karteziánskymi souřadnicemi [x,y,z] je uspořádána čtveřice [X,Y,Z,w] pro kterou platí x=X/w, y=Y/w, z=Z/w. Bod je svými homogenními souřadnicemi určen jednoznačně. Souřadnici w nazýváme váhou bodu. Hodnota této váhy je w=1 v případě lineárních transformací.
Transformace
http://wally.cs.iupui.edu/n351/3D/matrix.html
Používá se násobení matic. Bod, který chceme transformovat, má matici P(x, y, z, w), kde x, y, z jsou jeho souřadnice, w je 1 pokud je to bod, 0 pokud je to vektor.
Tansformační matice je pak matice 4 × 4:
<m>delim{[}{matrix{4}{4}{a_11 a_12 a_13 0 a_21 a_22 a_23 0 a_31 a_32 a_33 0 a_41 a_42 a_43 1}}{]}</m>
Transformace je pak tedy: P' = P × M
<m>delim{[}{matrix{1}{4}x_prime_y_prime_z_prime_1{]} = delim{[}{matrix{1}{4}{x y z 1}}{]} * delim{[}{matrix{4}{4}{a_11 a_12 a_13 0 a_21 a_22 a_23 0 a_31 a_32 a_33 0 a_41 a_42 a_43 1}}{]}</m>
Transformace je pak možné i skládat, provádí se to násobením transformačních matic mezi sebou. A protože jde o násobení matic, záleží na pořadí.
Posunutí
<m>delim{[}{matrix{4}{4}{1 0 0 0 0 1 0 0 0 0 1 0 d_x d_y d_z 1}}{]}</m>
Pro posun v opačném směru budou koeficienty d záporné.
Změna velikosti
<m>delim{[}{matrix{4}{4}{S_x 0 0 0 0 S_y 0 0 0 0 S_z 0 0 0 0 1}}{]}</m>
Pro zmenšení místo S použít 1/S.
Rotace
<m>R_x = delim{[}{matrix{4}{4}{1 0 0 0 0 {cos alpha} {sin alpha} 0 0 {-sin alpha} {cos alpha} 0 0 0 0 1}}{]}</m>
<m>R_y = delim{[}{matrix{4}{4}cos_alpha_0_sin_alpha_0_0_1_0_0_-sin_alpha_0_cos_alpha_0_0_0_0_1{]}</m>
<m>R_z = delim{[}{matrix{4}{4}cos_alpha_sin_alpha_0_0_-sin_alpha_cos_alpha_0_0_0_0_1_0_0_0_0_1{]}</m>
Zkosení
<m>Sh_YZ = delim{[}{matrix{4}{4}{1 Sh_y Sh_z 0 0 1 0 0 0 0 1 0 0 0 0 1}}{]}</m>
<m>Sh_XZ = delim{[}{matrix{4}{4}{1 0 0 0 Sh_x 1 Sh_z 0 0 0 1 0 0 0 0 1}}{]}</m>
<m>Sh_XY = delim{[}{matrix{4}{4}{1 0 0 0 0 1 0 0 Sh_x Sh_y 1 0 0 0 0 1}}{]}</m>
Reprezentace
Požadavky na modely:
- Obecnost (popis co nejrozsáhlejší třídy objektů)
- Úplnost (úpně popisuje daný objekt)
- Jednoznačnost (lze vyhodnotit pouze jedním způsobem)
- Unikátnost, jedinečnost (jednomu tělesu odpovídá jeden model)
- Přesnost (popisu objektu)
- Regulérnost (nemožnost vytvořit nereálnou reprezentaci)
- Konzistence vůči vybraným operacím tělesa stejné třídy
- Kompaktnost (malá paměťová náročnost)
- Možnost efektivního zpracování
- Manifold objekty – vyrobitelné1); nonmanifold – nevyrobitelné
- Eulerove rovnice – kontrola topologie objektu
- Eulerove operátory – realizace změn topologie objektu
Metody reprezentace
Konstruktivní geometrie (CSG)
Objekt je popsán stromem složeným z 3D primitiv, transformací a booleovských operací (uzly stromu).
Šablonování
Transformace (posun) 2D profilu po přímce, křivce nebo s měnícím se objemem (potahování) nebo rotace.
Dekompoziční modely

Diskrétní popis objektu dekompozicí jím obsaženého objemu na elementární objemové jednotky – krychle (voxel = pixel v 3D). Uložení dat – oktalový strom, 3D pole diskrétních hodnot nebo subvoxely. Vykreslení – algoritmus Marching cubes. Na obrázku je porovnání voxelové a polygonální konvičky (tady voxely nejsou vyhlazené přes cubes).
B-rep = Boundary representation
Objekt je popsán hranicemi.
- Drátový (nejsem si jistá jak je to česky) model - popis pomocí vrcholů a hran
- Polygonální model – popis pomocí vrcholů, hran a stěn. Pro popis v PC – okřídlená hrana (3 lineární senzamy – vrcholů, hran, stěn)
- Hraniční spline model – popis pomocí vrcholů, hran a stěn (spline plochy)
3D plochy
Plocha je definována bázovým polynomem a sítí bodů (matice).
- Bikubické plochy – interpolační, analogie Fergusonových křivek, matice 4×4 řídících bodů, spojitost plátů
- Beziérové plochy – aproximační, analogie Beziérových křivek, matice 4×4 řídících bodů, spojitost plátů
- NURBS plochy – aproximační, analogie NURBS křivek, matice 4×4 řídících bodů
Implicitní plochy
Modelování pomocí kostry kolem které je potenciální pole - určuje povrch objektu.
Zobrazení
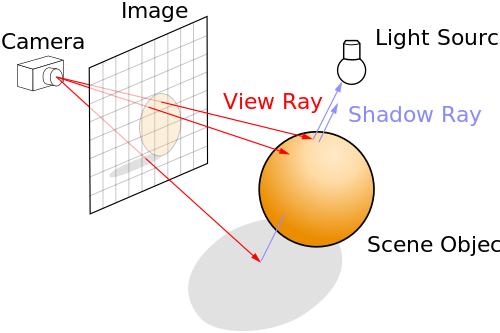
Ray tracing
Z mřížky jsou vystřelovány paprsky do scény, kde se různě odráží a pohlcují. Přitom se sleduje jejich barva.
Photon mapping
Pokročilá metoda, a výpočetně velice náročná, proto se většinou sama o sobě nepoužívá, ale slouží jen jako pomůcka pro globální iluminaci a ambient occlusion.
Funguje to tak, že do scény jsou ze světel vystřeleny fotony. Pokud foton narazí na polygon, v závislosti na materiálu se od něj buď část jeho energie pohltí (čímž na něm udělá „flek“ podle jeho intenzity) a odrazí se od něj dál do scény, nebo jím projde (např. sklo). Čím více odrazů fotonu povolíme, tím déle výpočet trvá, ale tím je přesnější. Z výše uvedeného plyne, že fotony se málo kdy dostanou do ostrých rohů, čímž se sama vyřešila AO, a pokud nebudeme energii fotonu brát jen jako jednorozměrné číslo, ale třeba jako RGB hodnoty, vyřeší se tím i GI. Výsledkem metody je pak fotonová mapa, což si lze představit jako flekatou texturu.

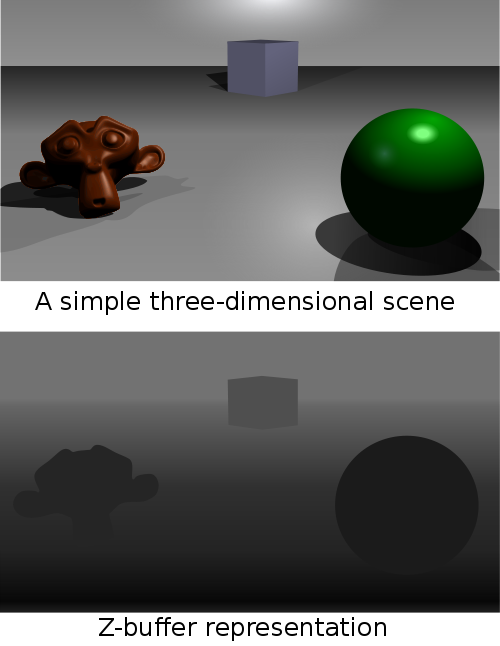
Z-buffer
Ukládá informace o hloubce objektů ve scéně. Není to přímo vykreslovací metoda, ale spíš způsob řešení viditelnosti.
Shrnutí
- transformace: změna souřadnic bodů v systému ve smyslu posunu, otočení, změny velikosti nebo třeba zešikmení
- homogenní souřadnice: abychom mohli všechny transformace dělat pomocí násobení matic, přidáváme k xyz ještě váhu (w), platí, že x = X/w
- násobení matic: záleží na pořadí, počítá se zprava!
- znát ty tranformační matice, ale asi o tom přímo nemluvit
- reprezentace: požadavky na modely jsou dost nechutné:(
- CSG: strom, listy jsou primitiva, uzly pak booleovské operace, paměťově výhodné
- šablonování: ideálně nakreslit profil pinčla a vysvětlit, že 3D model uděláme orotováním kolem osy
- dekompoziční modely: voxely, uloženy ve stromové struktuře, marching cubes (neumět, jen zmínit), použitelné třeba na medicínská data
- 3D plochy: polygonální model, wireframe, 3D plochy (podobně jako křivky ve 2D)
- implicitní plochy: kostra s potenciálním povrchem, metaballs
- zobrazení: ray casting nebo z-buffer pro řešení viditelnosti, ray tracing pro zobrazení (náročné), photon mapping pro získávání světelných map, radiosita: nejhezčí, nejnáročnější (plošky mohou vyzařovat světlo)
- osvětlovací model: je dobré vědět, že existuje nějaký Phongův, který je leet