
Obsah
Tahák
StateCharts
- Rozšíření
nedeterministickéhoKA - Synchronní komunikační mechanizmus
- Přechod na základě detekce události
reset
Diskrétní události
- Globální čas
- Událost kdykoliv asynchronně
- Výpočet daného bloku
v nanosekundách
Codesign konečné automaty
- Kombinace
nedeterministickýchkonečných automatů a diskrétních událostí - Lokálně synchronní a globálně asynchronní
- Neblokující buffery s konečnou velikostí – lze je přeplnit
VLIW
- Více funkčních jednotek
- Load/store architektura
Souběžnost řízená tokem dat
- Datové závislosti mezi operandy
Behaviorální hierarchie
- Dekompozice popisu chování úlohy
- Konec = výpočet všech podúloh v dané hierarchii
Komunikace
- Čtení sdíleného média
- Zprávy přes abstraktní kanály
Synchronizace
- Souběžně probíhající úlohy
- Společné hodinové signály
SpecCharts
- Program state machine
- Sdílená paměť a zasílání zpráv
- Přechody po ukončení stavu, nebo vyjímka
Rozdělování
- Exponenciální časová složitost
Univerzální standardní modelovací jazyk
- Neexistuje
- Překlad front-end → standardní
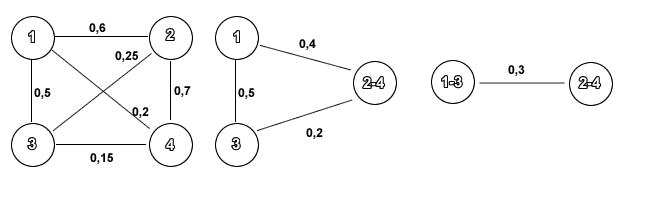
Hierarchický clustering
- Průměr hran do kříže1)
Stupeň využití
- Slack je zbytek do celého clocku (operace, která trvá 1,1 CLK má slack 90 %).
- Pak se jen vynásobí slacky počty operací a sečte se to.
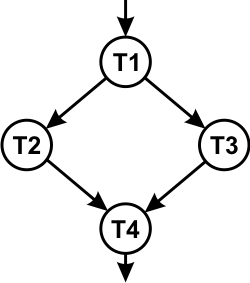
Doba výpočtu
Cílem je nejmenší doba výpočtu.2)
| Komponenta | Počet | Cena | Doba výpočtu | |||
|---|---|---|---|---|---|---|
| T1 | T2 | T3 | T4 | |||
| MIPS | 1 | 150 | 4 | 2 | ||
| DSP | 1 | 90 | 20 | 15 | 30 | |
| FPGA | 1 | 210 | 11 | 9 | ||
- Proč u T2 a T3 právě 11 a 15? Protože 11 + 15 < 20 + 9.
- A proč ne 11 a 9? Protože max(11, 15) < 11 + 9, no a taky proto, že máme jen jeden FPGA.
Doba výpočtu = 4 + max(11, 15)3) + 2 = 4 + 15 + 2 = 21
Cena = MIPS4) + DSP + FPGA = 150 + 90 + 210 = 450
Fidelity
Uděláš si dvojice ze všech možných kombinací odhadů a měření (odhad s odhadem, měření s měřením). Pak se koukneš, jestli jsou stejná znaménka nerovnosti u dvojic odhadu a měření, a výsledná fidelity je správně/dvojic.
| A | B | C | D | |
|---|---|---|---|---|
| E | 8 | 4 | 2 | 1 |
| M | 7 | 3 | 4 | 2 |
- E(A) > E(B); M(A) > M(B) ✔
- E(A) > E(C); M(A) > M(C) ✔
- E(A) > E(D); M(A) > M(D) ✔
- E(B) > E(C); M(B) < M(C) ✘
- E(B) > E(D); M(B) > M(D) ✔
- E(C) > E(D); M(C) > M(D) ✔
5/6 = 83 %
Struktury
| AND | OR | Struktura |
|---|---|---|
| Fixní | Programovatelné | ROM |
| Programovatelné | Programovatelné | PLA |
| Programovatelné | Fixní | PAL |
Amdahlův zákon
Speedup = (sekvenční + paralelizovatelné) / (sekvenční + (paralelizovatelné / stupeň urychlení))
40 % operací se podařilo urychlit dvojnásobně: 1 / (0,6 + (0,4/2)) = 1 / 0,8 = 1,25